
Download
CONVERSE Dataset
CONVERSE is a human interaction recognition dataset intended for the exploration of classifying naturally executed conversational scenarios between a pair of individuals via the use of pose and appearance based features. Motivated to describe a problem which represents subtle and complex behaviours between participants, the dataset provides several classes which are not easily defined by the poses they contain.
- For more details, please visit the following links: CONVERSE Dataset
3D Pose Estimation
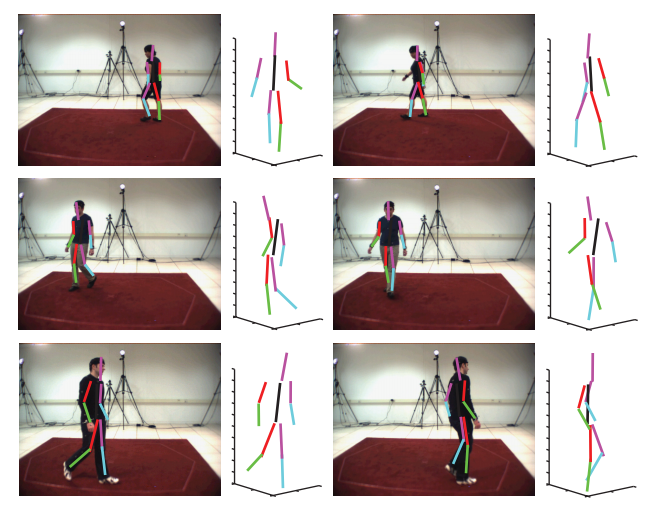
3D human pose estimation is a very difficult task. We propose that this problem can be more easily solved by first finding the solutions to a set of easier sub-problems. These are to locally estimate pose conditioned on a fixed root node state, which defines the global position and orientation of the person. The global solution can then be found using information extracted during this procedure. This approach has two key benefits: The first is that each local solution can be found by modeling the articulated object as a kinematic chain, which has far less degrees of freedom than alternative models. The second is that by using this approach we can represent, or support, a much larger area of the posterior than is currently possible. This allows far more robust algorithms to be implemented since there is far less pressure to prune the search space to free up computational resources. We apply this approach to two problems: The first is single frame monocular 3D pose estimation, where we propose a method to directly extract 3D pose without first extracting any intermediate 2D representation or being dependent on strong spatial prior models. The second is multi-view 3D tracking where we show that using the above technique results in an approach that is far more robust than current approaches, without relying on strong temporal prior models. In both domains we demonstrate the strength and versatility of the proposed method.
 |
- IVC Journal Paper Fixing the Root Node: Efficient Tracking and Detection of 3D Human Pose through Local Solutions.
- Source code are available to download.
MAC Model
We propose an active contour model using an external force field that is based on magnetostatics and hypothesised magnetic interactions between the active contour and object boundaries. The major contribution of the method is that the interaction of its forces can greatly improve the active contour in capturing complex geometries and dealing with difficult initializations, weak edges and broken boundaries. The proposed method is shown to achieve significant improvements when compared against six well-known and state-of-the-art shape recovery methods, including the geodesic snake, the generalised version of GVF snake, the combined geodesic and GVF snake, and the charged particle model.

Initialisation

Converged result
MAC evolution
- Xianghua Xie and Majid Mirmehdi, MAC: Magnetostatic Active Contour Model, IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 30, number 4, pages 632 - 646, IEEE CS Press, April 2008. Download paper.
- An executable demo software written in JAVA for both Linux and Windows platforms can be downloaded from HERE. Please email me for password to unzip: x.xie at swansea.ac.uk
- Latest release: MAC-exe-release3.1.zip (June 2008).
- For more details, please visit the following links: